NASAs Jet Propulsion Laboratory bebudede for nylig, at det udvikler en lille dronehelikopter for at spejde vejen for fremtidige Mars-rovere. Hvorfor skulle Mars-rovere have brug for en sådan robotguide? Svaret er, at det er virkelig svært at køre på Mars.
Her på Jorden kan robotter, der udforsker vulkanfælge eller hjælpe redningsmænd, drives med fjernbetjening med en joystick. Dette skyldes, at radiosignaler næsten øjeblikkeligt når robotten fra sit kontrolcenter. Det er ikke meget sværere at køre på månen. Radiosignaler, der kører med lysets hastighed, tager cirka to og et halvt sekund for at tage rundturen til månen og tilbage. Denne forsinkelse er ikke længe nok til at alvorligt forstyrre fjernbetjeningskørsel. I 1970'erne kørte sovjetiske controllere Lunokhod-månens rover på denne måde, hvor de med succes udforskede mere end 40 km måneterræn.
Det er meget sværere at køre på Mars, fordi det er så meget længere væk. Afhængigt af dens position i forhold til Jorden, kan signaler tage mellem 8 og 42 minutter for returrejsen. Forprogrammerede instruktioner skal sendes til rover, som den derefter udfører på egen hånd. Hver Martian-drev tager timer med omhyggelig planlægning. Stereobilleder taget af roverens navigeringskameraer undersøges omhyggeligt af ingeniører. Billeder fra rumfartøj, der kredser rundt om Mars, giver undertiden yderligere oplysninger.
En rover kan programmeres enten til blot at udføre en liste over kørekommandoer sendt fra Jorden, eller den kan bruge billeder taget af dens navigeringskameraer og behandles af dens indbyggede computere til at måle hastighed og opdage forhindringer eller farer i sig selv. Det kan endda plotte sin egen sikre vej til et specifikt mål. Drev baseret på instruktioner fra jorden er de hurtigste.
Mars Exploration Rovers Spirit and Opportunity kunne køre op til 124 meter på en time på denne måde. Dette svarer til længden på en amerikansk fodboldbane. Men denne tilstand var også den mindst sikre.
Når roveren aktivt guider sig selv med sine kameraer, er fremskridtene sikrere, men meget langsommere på grund af al den nødvendige billedbehandling. Det kan fortsætte med så lidt som 10 meter i timen, hvilket er omtrent afstanden fra mållinjen til 10 yardlinjen på en amerikansk fodboldbane. Denne metode skal bruges, når rover ikke har et klart billede af ruten forude, hvilket ofte er tilfældet på grund af ru og kuperet terræn.
Fra begyndelsen af 2015 er den fjerneste nysgerrighed, der har kørt på en enkelt dag, 144 meter. Mulighedens længste daglige kørsel var 224 meter, en afstand fra to amerikanske fodboldbaner.
Hvis jorden controllere kunne få et bedre overblik over stien fremad, kunne de udarbejde instruktioner, der tillader en fremtidig rover at sikkert køre meget længere på en dag.
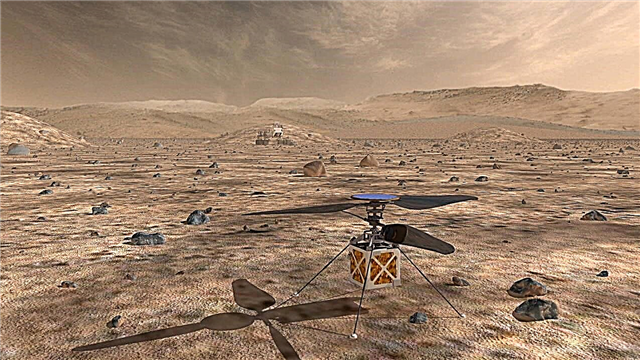
Det er her ideen om en dronehelikopter kommer ind. Helikopteren kunne flyve ud foran roveren hver dag. Billeder lavet fra dets luftfartspunkt ville være uvurderlige for jordkontrollører for at identificere punkter af videnskabelig interesse og planlægge kørselsruter for at komme dertil.
At flyve en helikopter på Mars giver særlige udfordringer. En fordel er, at Mars-tyngdekraften kun er 38% så stærk som Jorden, så at helikopteren ikke behøver at generere så meget løft som en af den samme masse på Jorden. En helikopter's propelblad genererer løft ved at skubbe luft nedad. Dette er sværere at gøre på Mars end på Jorden, fordi den Martiske atmosfære er hundrede gange tyndere. For at fortrænge nok luft, skal propellerbladene dreje meget hurtigt eller være meget store.
Kopimaskinen skal være i stand til at flyve alene, ved hjælp af forudgående instruktioner og opretholde en stabil flyvning langs en forud specificeret rute. Den skal lande og starte gentagne gange i klippet Martian terræn. Endelig skal den være i stand til at overleve Mars's hårde forhold, hvor temperaturen sænker til 100 grader Fahrenheit eller lavere hver nat.
JPL-ingeniørerne designede en copter med en masse på 1 kg; en lille brøkdel af den 900 kg masse af Curiosity rover. Dens propelvinger spænder 1,1 meter fra vingespids til vingespids og er i stand til at dreje med 3400 omdrejninger pr. Minut. Kroppen er på størrelse med en vævskasse.
Copteren er solcelledrevet med en disk med solceller, der samler nok strøm hver dag til at drive en flyvning på to til tre minutter og for at varme køretøjet om natten. Den kan flyve omkring en halv kilometer på den tid og samle billeder til transmission til jordkontrol, som den går. Ingeniører forventer, at rekognosering, som dronekopteren samler, vil være uvurderlig i planlægningen af en rover-drev og tredobler afstanden, der kan køres på en dag.
Referencer og videre læsning:
Tak til Mark Maimone fra NASA Jet Propulsion Laboratory for information om de daglige kørselsafstande for nysgerrighed og mulighed.
J.J. Biesiadecki, P. C. Leger, og M.W. Maimone (2007), 'kompromis mellem instrueret og autonom kørsel på Mars-efterforskningsrovers', The International Journal of Robotics Research, 26 (1), 91-104
E. Howell, muligheden Mars rover vandrer forbi 41 kilometer mod ‘Marathon Valley’, Space Magazine, december 2014.
T. Reyes, en utrolig rejse, Mars Curiosity rover når basen af Mount Sharp. Space Magazine, september 2014.
Helikopter kan være 'spejder' for Mars-rovere. NASA Jet Propulsion Laboratory Pressemeddelelse. 22. januar 2015.
Crazy Engineering: Mars-helikopteren. NASA Jet Propulsion Laboratory video.
Curiosity - Mars Science Laboratory, NASA.
Mars- Future Rover-planer. NASA