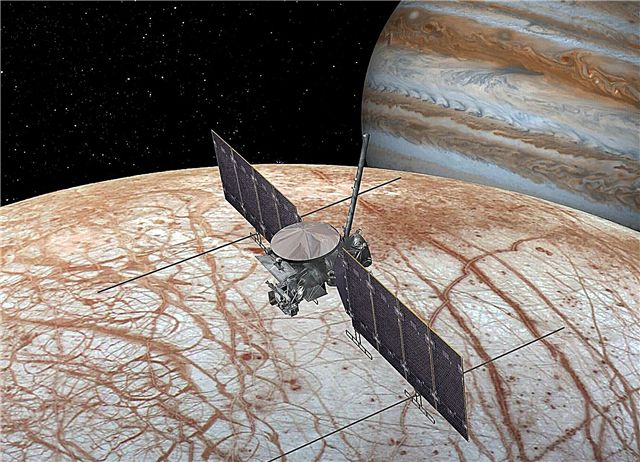
I 2023 planlægger NASA at lancere Europa Clipper mission, en robotudforsker, der vil studere Jupiters gåtefulde måne Europa. Formålet med denne mission er at udforske Europas isskal og interiør for at lære mere om månens sammensætning, geologi og interaktion mellem overfladen og undergrunden. Mest af alt er formålet med denne mission at belyse, hvorvidt livet kunne eksistere i Europas indre hav eller ikke.
Dette giver adskillige udfordringer, hvoraf mange stammer fra det faktum, at Europa Clipper vil være meget langt fra Jorden, når den udfører sine videnskabelige operationer. For at tackle dette designede et team af forskere fra NASAs Jet Propulsion Laboratory (JPL) og Arizona State University (ASU) en række maskinlæringsalgoritmer, der gør det muligt for missionen at udforske Europa med en grad af autonom.
Hvordan disse algoritmer muligvis kan hjælpe med fremtidige efterforskningsopgaver i dybe rum var emnet for en præsentation, der blev leveret i sidste uge (7. august) på den 25. ACM SIGKDD-konference om videnopdagelse og datamining i Anchorage, Alaska. Denne årlige konference samler forskere og praktikere inden for datavidenskab, data mining og analytics fra hele verden for at diskutere den seneste udvikling og applikationer på området.
Når det kommer helt ned til det, er det tidskrævende, udfordrende arbejde at kommunikere med dybe rumopgaver. Når du kommunikerer med missioner på Mars's overflade eller i kredsløb, kan det tage et signal op til 25 minutter at nå dem fra Jorden (eller tilbage igen). Afsendelse af signaler til Jupiter kan derimod tage mellem 30 minutter og op til en time, afhængigt af hvor det er i sin bane i forhold til Jorden.
Som forfatterne bemærker i deres undersøgelse, transmitteres rumfartøjsaktiviteter typisk i et forudplanlagt script snarere end ved hjælp af kommandoer i realtid. Denne tilgang er meget effektiv, når positionen, miljøet og andre faktorer, der påvirker rumfartøjet er kendt eller kan forudsiges på forhånd. Det betyder dog også, at missionskontrollører ikke kan reagere på uventet udvikling i realtid.
Som Dr. Kiri L. Wagstaff, en hovedforsker ved NASA JPLs Machine Learning and Instrument Autonomy Group, forklarede til Space Magazine via e-mail:
”At udforske en verden, der er for fjern til at tillade direkte menneskelig kontrol, er udfordrende. Alle aktiviteter skal for-scriptes. Et hurtigt svar på nye opdagelser eller ændringer i miljøet kræver, at rumfartøjet selv træffer beslutninger, som vi kalder rumfartøjs autonomi. Derudover betyder det, at man opererer næsten en milliard kilometer væk fra Jorden, dataoverførselshastighederne er meget lave.
“Rumfartøjets evne til at indsamle data overstiger det, der kan sendes tilbage. Dette rejser spørgsmålet om, hvilke data der skal indsamles, og hvordan de skal prioriteres. Endelig, i tilfælde af Europa, vil rumfartøjet også blive bombarderet af intens stråling, som kan ødelægge data og forårsage computer nulstilling. At håndtere disse farer kræver også selvstændig beslutningstagning. ”
Af denne grund begyndte Dr. Wagstaff og hendes kolleger at undersøge mulige metoder til dataanalyse ombord, der ville fungere uanset hvor og når direkte menneskelig tilsyn ikke er muligt. Disse metoder er især vigtige, når man håndterer sjældne, kortvarige begivenheder, hvis forekomst, placering og varighed ikke kan forudsiges.
Disse inkluderer fænomener som de støvduder, der er blevet observeret på Mars, meteoritpåvirkninger, lyn på Saturn og iskolde dunke udsendt af Enceladus og andre kroppe. For at tackle dette kiggede Dr. Wagstaff og hendes team på de nylige fremskridt inden for maskinlæringsalgoritmer, der muliggør en grad af automatisering og uafhængig beslutningstagning inden for computing. Som Dr. Wagstaff sagde:
”Maskinindlæringsmetoder gør det muligt for selve rumfartøjet at undersøge dataene, når de indsamles. Rumfartøjet kan derefter identificere, hvilke observationer der indeholder begivenheder af interesse. Dette kan påvirke tildelingen af downlink-prioriteter. Målet er at øge chancen for, at de mest interessante opdagelser først downlinkes. Når dataindsamling overstiger det, der kan transmitteres, kan rumfartøjet selv miner de ekstra data for værdifulde videnskabsnuggets.
”Onboard-analyse kan også give rumfartøjet mulighed for at beslutte, hvilke data der skal indsamles næste, baseret på hvad det allerede har opdaget. Dette er blevet demonstreret i Jordens kredsløb ved hjælp af det autonome videnskabseksperiment og på Mars's overflade ved hjælp af AEGIS-systemet på Mars Science Laboratory (Curiosity) rover. Autonom, responsiv dataindsamling kan i høj grad fremskynde den videnskabelige efterforskning. Vi sigter også mod at udvide denne evne til det ydre solsystem. ”
Disse algoritmer blev specifikt designet til at hjælpe med tre typer af videnskabelige undersøgelser, der vil være ekstremt vigtige for Europa Clipper mission. Disse inkluderer påvisning af termiske anomalier (varme pletter), kompositionelle afvigelser (usædvanlige overflademineraler eller aflejringer) og aktive dråber af iskaldt stof fra Europas hav under jorden.
"I denne indstilling er beregningen meget begrænset," sagde Dr. Wagstaff. ”Rumfartøjscomputeren kører med en hastighed, der ligner desktopcomputer fra midten af slutningen af 1990'erne (~ 200 MHz). Derfor har vi prioriteret enkle, effektive algoritmer. En sidefordel er, at algoritmerne er lette at forstå, implementere og fortolke. ”
For at teste deres metode anvendte teamet deres algoritmer til både simulerede data og observationer fra tidligere rummissioner. Disse inkluderede Galileo rumfartøj, der foretog spektrale observationer af Europa for at lære mere om dets sammensætning; det Cassini rumfartøj, der fandt billeder af blæseraktivitet på Saturns måne Enceladus; og Nye horisonter rumfartsbilleder af vulkansk aktivitet på Jupiters måne Io.
Resultaterne af disse test viste, at hver af de tre algoritmer demonstrerede en tilstrækkelig høj ydeevne til at bidrage til de videnskabelige mål, der er skitseret i 2011 Planetary Science Decadal Survey. Disse inkluderer "bekræftelse af tilstedeværelsen af et indre hav, karakterisering af satellitens isskal og muliggør forståelse af dets geologiske historie" på Europa for at bekræfte "potentialet i det ydre solsystem som en bolig til livet".
Derudover kunne disse algoritmer have vidtrækkende konsekvenser for andre robotmissioner til dybe pladsdestinationer. Ud over Europa og Jupiters månesystem håber NASA at udforske Saturns måner Enceladus og Titan for mulige tegn på liv i den nærmeste fremtid samt destinationer, der er endnu længere væk (som Neptuns måne Triton og endda Pluto). Men applikationerne stopper ikke der. Wagstaff udtrykte det:
”Rumfartøjs autonomi gør det muligt for os at undersøge, hvor mennesker ikke kan gå. Det inkluderer fjerndestinationer som Jupiter og placeringer ud over vores eget solsystem. Det inkluderer også tættere miljøer, der er farlige for mennesker, såsom bunden af havbunden eller indstillinger med stor stråling her på Jorden. ”
Det er ikke svært at forestille sig en nær fremtid, hvor semi-autonome robotopgaver er i stand til at udforske det ydre og indre række af solsystemet uden regelmæssig menneskelig tilsyn. Når man ser længere ind i fremtiden, er det ikke svært at forestille sig en tidsalder, hvor fuldt autonome robotter er i stand til at udforske ekstrasolplaneter og sende deres fund hjem.
Og i mellemtiden en semi-autonom Europa Clipper kan finde beviset på, at vi alle venter på! Det ville være biosignaturer, der beviser, at der virkelig er liv over Jorden!