Astronauter, start dine rover-motorer. To astronauter fjernstyrede for nylig et rover-køretøj i Californien fra deres aborre på den internationale rumstation - omkring 400 mil (400 kilometer) overhead.
Konceptet er sejt i sig selv, men NASA har højere mål. Det tænker på de måne- og asteroide- og Mars-menneskelige missioner, som agenturet virkelig gerne vil udføre en dag, hvis det modtager penge og tilladelse.
Potentielt kan du sige, at du kunne have en Mars-besætning, der bruger rovere til at udforske så meget af overfladen som muligt på en begrænset tid.
Mars nysgerrighed og dens forgængers rovere har fundet fantastiske ting på Mars, men udfordringen er den gennemsnitlige forsinkelse på 20 minutter i kommunikationen mellem Mars og Jorden. NASA tegner fejlagtigt dette problem gennem teknikker som f.eks. Software til at undgå fare, så nysgerrighed, siger, ikke ville gå ned i en stor kampesten. (Flere teknikker fra NASA på dette link.) Men at have astronauter over overfladen ville skære ned på tidsforsinkelsen og potentielt ændre Mars rover-kørsel for evigt.

Så om den test: to astronauter indtil videre har kørt planetkøretøjets prototype K10 omkring et “Roverscape” på NASAs Ames Research Center i Californien. NASA kalder disse kører "den første fuldt interaktive fjernbetjening af en planetarisk rover af en astronaut i rummet."
Ekspedition 36's Chris Cassidy var først op den 15. juni og tilbragte tre timer med at bevæge maskinen rundt i det stenbelagte område, som er på størrelse med to fodboldbaner. Derefter tog hans besætningskammerat Luca Parmitano den 26. juli en tur, hvor han gik så vidt, at han udsendte en simuleret radioantenne. En anden testsession skulle finde sted i august.
“Mens det er almindelig praksis ved undersøisk efterforskning at bruge en joystick og have direkte kontrol over fjernubåde, er K10-robotterne mere intelligente,” sagde Terry Fong, projektleder for menneskelig efterforskning telerobotik på Ames.
”Astronauter interagerer med robotterne på et højere niveau og fortæller dem, hvor de skal hen, og så finder robotten selv uafhængigt og intelligent ud af, hvordan man sikkert kommer dertil,” tilføjede Fong, der også er direktør for Ames 'intelligente robotikgruppe.
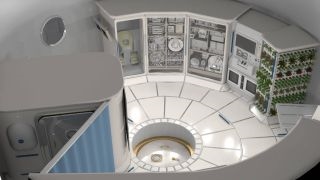
Testene simulerede en mission til månens L2 Lagrangian-punkt, et sted hvor den kombinerede tyngdekraft af månen og Jorden tillader et rumfartøj at forblive praktisk talt stabilt over overfladen. En mulighed for en sådan mission ville være at indsætte et radioteleskop på månens side overfor Jorden, langt fra Jordens radiostøj, sagde NASA.
Disse test viser også et par tekniske første:
- NASA tester et RAPID-robotdatameddelingssystem (Robot Application Programming Interface Delegate) for at kontrollere roboten fra rummet og arbejder i det væsentlige med at fjerne oplysningerne til det blotte væsentlige for at gøre kommunikationen så let som muligt. (RAPID er blevet testet før, men aldrig på denne måde.)
- Agenturet bruger også sin Ensemble-software i rummet til telerobotik for første gang. Den beskriver dette som "åben arkitektur til udvikling, integration og implementering af mission operation software."
Kilde: NASA