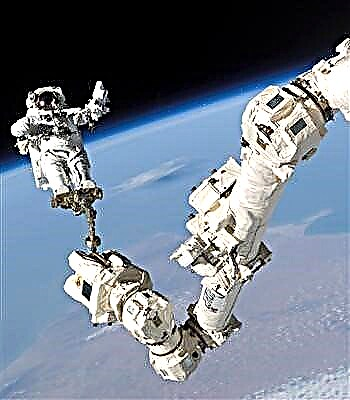
Den 19. april 2001 blev rumfærgen Endeavours STS-100-mission lanceret til rumstationen, og i nyttelastbuggen var Canadarm2, en større og mere robust efterfølger af rumfærgen Canadarm. Space Station Remote Manipulator System (SSRMS) er en sofistikeret "konstruktionskran" og er ansvarlig for meget af den succesrige bygning af ISS - modul for modul - i rummet.
”Hun er uden tvivl en af de mest kritiske komponenter om bord på stationen, der har deltaget i konstruktionen af rumfartøjet, der er på bane i dag,” sagde Mike Suffredini, programleder for den internationale rumstation. ”22 missioner er blevet understøttet af Canadarm2, hvoraf to er fanget og berget af HTV-køretøjet, og i al den tid med absolut fejlfri ydelse. Uden hende kunne vi ikke være kommet til, hvor vi er i dag. ”
Se et galleri med billeder af Canadarm2s 10 år i rumbygningsbranchen.

Canadarm2 blev installeret på ISS af astronaut Chris Hadfield under den første rumvandring af en canadier. Canadarm2 har losset hundreder af tons udstyr og forsyninger, der er færget med rumfærgen og hjulpet næsten 100 rumvandringer. Endeavours sidste flyvning senere i denne måned markerer Canadarm2s 28. Shuttle-mission.

Det canadiske rumfartsagentur siger, at Canadarm2s rolle på ISS vil udvide, når orbitallaboratoriet nærmer sig færdiggørelsen: Ud over at udføre rutinemæssig vedligeholdelse, vil robotarmen gøre hyppigere "kosmiske fangster", hvor den vil fange, anløbe og senere frigive besøgende rumfartøjer , som det har gjort med HTV. Når rumfærgen går på pension, vil genanvendelige kommercielle rumfartøjer, som SpaceX's Dragon og Orbital's Cygnus, blive brugt til at bringe forsyninger og udstyr til ISS. Canadarm2 vil fange hver af disse besøgskøretøjer. I slutningen af 2011 og begyndelsen af 2012 vil Canadarm2 fange en række 6 kommercielle rumfartøjer på kun 7 måneder, begyndende med Dragon-rumfartøjet, der i øjeblikket er planlagt til at ankomme i oktober 2011.




Mere info om SSRMS og hvordan det blev bygget:
Ekspedition 27-besætningen ombord på ISS hylder 10 års SSRMS: