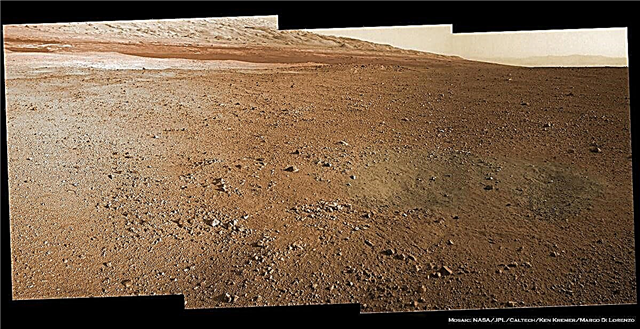
Billedtekst: Mosaik af Mount Sharp inde i Curiosity's Gale Crater landing site. Gale Crater i uklar afstand. Denne mosaik blev syet af tre Navcam-billeder i fuld opløsning, der blev returneret af Curiosity på Sol 2 (8. august) og farvet på basis af Mastcam-billeder fra 34 millimeter-kameraet. Behandling af Ken Kremer og Marco Di Lorenzo. Kredit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Curiosity-roveren har sendt de første detaljerede billeder af Mount Sharp tilbage og tilbyder en overvældende første visning af hendes ultimative drivmålsætning og er nu midt i en afgørende ”hjerne transplantation” i denne weekend, der vil omdanne hende til en fuldt operationel rover.
Videnskabsteamet vil lede den seks-hjulede nysgerrighed til at begynde at klatre på Mount Sharp på et senere tidspunkt under rovers 'toårige primære mission efter at have krydset og grundigt undersøgt gulvet på hendes landingssted inde i Gale Crater.
Se vores mosaik med fokus på bunden af Mount Sharp ved hjælp af tre billeder i fuld opløsning, der er snappet af Navcam-navigeringskameraet placeret på det nyoprettede kamera og instrumentmast med farvelægning baseret på det 34 millimeter store Mastcam-farvekamera.
Nysgerrigheden kom næsten til at hvile fladt på den martiske overflade, men med en let 3 graders hældning foran og billederne hidtil er taget fra det forprogrammerede synspunkt, ca. seks miles fra basen af Mount Sharp.
Terrænet er overstrødet med små småsten, der kan stamme fra en nærliggende alluvial ventilator, gennem hvilken der flydede flydende vand for længe siden, mener forsker. Observationer fra kredsløb med NASAs Mars Reconnaissance Orbiter har identificeret ler- og sulfatmineraler i de nedre lag af Mount Sharp, hvilket indikerer en våd historie. I højere højder håber videnskabsmænd at opdage et grænselag og indikationer på, hvad der førte til den "store dessertbegivenhed" og tab af flydende vand på den gamle Marsoverflade.
Denne weekend er nysgerrighed også begyndt at sende spektakulære hi res Mastcam-billeder, der langt overstiger noget andet indtil videre. Her er Mastcam 360-pano, som den er samlet af NASA indtil videre:

Billedtekst: Første Hi-Res Color Mosaic of Curiositys Mastcam-billeder. NASA / JPL-Caltech / MSSS
Men før den bilstore robot faktisk kan svirve rundt, række ud med sin 7 fod (2 meter) lange instrumentbelastede arm og hente prøver til analyse ved de indbyggede kemilaboratorier, hun har brug for softwaren smarts for at udføre videnskabsopgaverne.
Med alle de oprindelige målsætninger efter landing, der er opfyldt, bruger ingeniører ved NASAs Jet Propulsion Lab i Pasadena, Californien, 4 Sols eller Martian dage, og beslaglægger denne weekend for at uploade en ny softwarepakke med navnet "R10", der er optimeret til overfladedrift og erstatter den nuværende “R9” -pakke.
”Vi designede missionen fra starten for at være i stand til at opgradere softwaren efter behov i forskellige faser af missionen,” sagde Ben Cichy fra NASAs Jet Propulsion Laboratory i Pasadena, Californien, chef softwareingeniør for Mars Science Laboratory-missionen. ”Flysoftwareversionen Curiosity bruger i øjeblikket [R9] var virkelig fokuseret på landing af køretøjet. Det inkluderer mange muligheder, som vi bare ikke har brug for mere. Det giver os basale muligheder for at betjene rover på overfladen, men vi har planlagt hele tiden at skifte over efter landing til en version af flysoftware, der virkelig er optimeret til overfladedrift. ”
Software på både de primære computere og backup-computere opdateres omhyggeligt i trin for trin. Han sagde, at en første "tå-dyppe" på fredag for at teste opgraderingen var det første skridt.
”R10 er optimeret til overfladedrift og har det, som videnskabsteamet ønsker. Det bliver downloadet over de næste fire Sols for at muliggøre denne fantastiske mission, ”sagde Cichy på en JPL-nyheds briefing den 10. august. De vil sætte sig ned på videnskaben for de næste fire Sols under installationen.
"Lige nu har vi kapaciteten i vores basale overfladesoftware til at tjekke instrumenternes helbred, men vi har ikke rigtig evnen til at gå og udnytte fuldt ud al denne fantastiske hardware, vi sendte til Mars."
”Så R10-softwaren giver os muligheden for at bruge robotarmen fuldt ud, at bruge boremetoden, bruge støvfjernelsesværktøjet, bruge hele prøveudtagningskæden og skade prøverne og analysere dem, alt dette spændende arbejde denne mission vil gøre .”
“Nysgerrighed er en Martian mega rover og er født til at køre! R10 giver os mulighed for at køre autonomt og bruge billeder til at opdage farer og køre sikkert. ”
Indtil videre går softwareopgraderingen som planlagt i denne weekend.
Nysgerrighed foretog en hidtil uset pinlanding inde i Gale-krateret den 5. / 6. August ved hjælp af den raketdrevne "Sky Crane" -afstigning, som sænkede nysgerrigheden ved hjælp af kabler på den røde planets overflade, nøjagtigt som planlagt på sletterne på Mount Sharp, kun få miles fra base af det gigantiske bjerg.
Mount Sharp dækker meget af det indre af den 96 km brede (154 km) Gale Crater. Toppen på det 3,4 mil høje lagdelte bjerg er højere end Mount Whitney i Californien.
Til sammenligning se Curiositys oprindelige bredere felt efter landing af skud fra Mount Sharp i 2 D og 3 D fra den lavere opløsning Hazcam-kameraer, her
NASAs 1 ton mega rover Curiosity er den største og mest komplekse robot, der nogensinde er sendt til overfladen af en anden planet, idet den udnytter en nyttelast på 10 moderne videnskabelige instrumenter, der vejer 15 gange mere end noget tidligere køretøj. Curiositys mål er at bestemme, om Mars nogensinde var i stand til at understøtte mikrobiel liv, fortid eller nutid, og at søge efter tegn på liv i form af organiske molekyler.