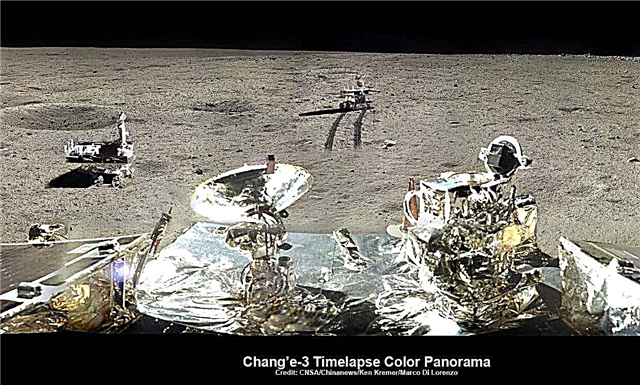
Chang’e-3 / Yutu Timelapse Color Panorama
Denne nyligt udvidede timelapse-sammensatte udsigt viser Kinas Yutu-månesving i to positioner, der passerer ved krateret og kører syd og væk fra Chang'e-3-månelandingsstedet for evigt ca. en uge efter december. Se komplet 360-graders landingssted timelapse-panorama her og APOD 3. februar 2014. Chang'e-3 landers ekstreme ultraviolette (EUV) kamera er til højre, antenne til venstre. Kredit: CNSA / Chinanews / Ken Kremer / Marco Di Lorenzo - kenkremer.com.
Se vores komplette Yutu-timelapse-pano på NASA APOD 3. februar 2014: http://apod.nasa.gov/apod/ap140203.htmebrit/caption]
KENNEDY SPACE CENTER, FL - Kinas jomfru måne rover Yutu vågnede op fra sin regelmæssige to uger lange sludder fredag den 14. marts for at begynde den 4. månedag siden sonderingshistorien, der gjorde touchdown på overfladen af Jordens nærmeste nabo i midten af december 2013.
Men den elskende robot er stadig skidt og lider under mekaniske kontrolproblemer, der dukkede op i slutningen af januar 2014 ifølge kinesiske rumansvarlige.
Chang'e-3-mødeskibets lander, der deponerede Yutu på den pockmarkede måneflade, vågnede også to dage tidligere onsdag den 12. marts.
”Yutu og landeren har genstartet deres operationer og udforsker som planlagt,” ifølge Kinas statsadministration for videnskab, teknologi og industri til nationalt forsvar (SASTIND), der er ansvarlig for udførelsen af Chang’e-3-missionen.

Yutu er Kinas første Moon-rover nogensinde og opnåede med succes en blød landing på Månen den 14. december 2013, med piggybacked oven på Chang'e-3-mødeskibets lander.
Men "de kontrolspørgsmål, der har urolige Yutu siden januar, er fortsat," siger Kinas regeringsejede nyhedsagentur Xinhua.
Den enormt populære 'Yutu' rover lider stadig under en manglende evne til at manøvrere dets livgivende solcellepaneler. Det er heller ikke i stand til at aktivere dets seks hjul og bevæge sig rundt på overfladen - som jeg rapporterede her.
På det tidspunkt, hvor Yutus 2. søvnperiode i Lunar begyndte den 25. januar 2014, havde kinesiske rumansvarlige annonceret, at robotens fremtid var i fare, efter at den led af en uidentificeret "mekanisk kontrolanomali" på grund af den "komplicerede måneflade."

Tidligere denne måned meddelte Kina, at "Yutu led en funktionsfejl i kontrolkredsløbet i sin køretøj."
”Kontrolkredsløbsproblemet forhindrede Yutu i at gå ind i den anden sovesal som planlagt,” sagde Ye Peijian, chefforsker for Chang’e-3-programmet, i et eksklusivt interview med Xinhua.
Et fungerende kontrolkredsløb er påkrævet for at sænke roversmasten og beskytte de sarte komponenter og instrumenter monteret på masten mod direkte lidelse af den ekstremt hårde kulde i Månens tilbagevendende nattetidsperioder.
”Normal dvaleafgift har brug for Yutu for at folde sin mast og solcellepaneler,” sagde Ye ifølge CCTV, Kinas statslige tv-spredning.
Heldigvis fungerer det panoramiske kamera, radar og andre scieneapparater og udstyr normalt, siger SASTIND.
Yutu knækkede endda et par nye billeder af lander i løbet af Lunar Day 3.
Se vores mosaik af Yutu's Lunar Day 3 landerbillede såvel som vores komplette 360 graders timelapse-farvepanorama fra Lunar Day 1 heri og på NASA APOD den 3. februar 2014 - samlet af Marco Di Lorenzo og Ken Kremer.

Ved at vågne op igen den 14. marts overlevede roboten på 140 kg også i sin tre måneders designlevetid på månen.
Yutu's mål er at gennemføre en roving-ekspedition for at undersøge månens overfladesammensætning og naturressourcer.
Indtil videre fungerer Chang'e-3 landeren på 1200 kg som planlagt i de første tre månedage, siger SASTIND.
"Landerens optiske teleskop, ekstreme ultraviolette kameraer og måling af månestøv afsluttede planlagte opgaver og fik en stor mængde data," siger Kinas regeringsejede nyhedsagentur Xinhua.
Kina er kun det 3. land i verden, der med succes blød lander et rumfartøj på Jordens nærmeste nabo efter De Forenede Stater og Sovjetunionen.
Hold øje med Ken's fortsatte Chang’e-3, Orion, Orbital Sciences, SpaceX, kommerciel plads, LADEE, Mars og flere planetariske og menneskelige rumfartnyheder. Lær mere på Ken's kommende præsentationer på NEAF astro / rum-konference den 12./13.