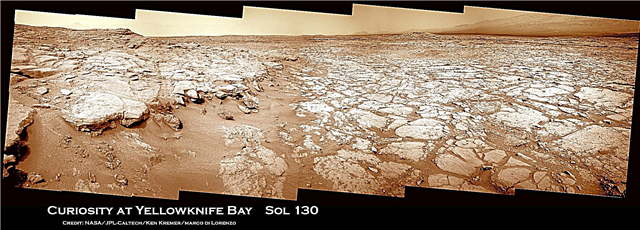
Billedtekst: Nysgerrighed scanner 'Yellowknife Bay' på Sol 130. 17, som blev syet sammen fra navigationskamera-billeder (Navcam). Kredit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
I dag (25. december) fejrer nysgerrighed hendes 1. jul på Mars på et sted kaldet ‘Yellowknife Bay’. Det er Sol 138 og næsten 5 måneder siden pulsen bankede den 6. august 2012 inde i Gale Crater. Robotten er i fremragende helbred.
I mellemtiden vil hendes ældre søster Opportunity snart fejre et uundgåeligt 9 Jordår på Mars om et par korte uger den 24. januar 2013 - på den anden side af planeten.
NASAs nysgerrighedsrover nåede den lave depression med navnet ‘Yellowknife Bay’ på Sol 130 (17. december, 2012) efter at have faldet ca. 0,5 meter (0,5 m) ned ad en blid hældning inde i en geologisk funktion kaldet ‘Glenelg’. Se vores panoramamosaikker fra Yellowknife Bay - over og nedenfor for en kontekstvisning.
Videnskabsteamet søger efter en interessant klippe til den åbne brug af den højdrevne hammerbor.
I henhold til en ny rapport i SpaceRef er boringen blevet forsinket på grund af bekymring for, at friktionsopvarmning potentielt kan forårsage forurening af klippet til en gooey "Martian Honey", der potentielt kan tilstoppe og alvorligt skade prøven, der håndterer sigter og mekanismer. Så teamet evaluerer omhyggeligt typen af klippemål og boreprocedurerne, før de forpligter sig til den indledende brug af den slagboremaskine, der er placeret på tårnet ved enden af robotarmen.
Holdet valgte at køre til ‘Yellowknife Bay’, fordi det har en anden type geologisk terræn sammenlignet med hvad Curiosity har kørt på tidligere. Området ‘Glenelg’ ligger i krydset mellem tre forskellige typer geologisk terræn og er Curiositys første udvidede videnskabelige destination.
Nysgerrighed ankom til læben fra Yellowknife Bay på Sol 124 og gik ind i bassinet på Sol 125 (12. december) og knækkede en spejderende panoramaudsigt, der kiggede ind i det indbydende sted. Rover bruger også APXS røntgenmineralspektrometer, ChemCam-laser og MAHLI-håndlinsebilledoptager til at indsamle indledende data om videnskabelig karakterisering.

Nysgerrighed toppede sig omkring Yellowknife Bay på Sol 125, 12. december 2012. Roveren kørte fortsat inde i bassinet for at søge efter 1. stenbormål. Kredit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Indtil videre har rover gennemkørt en samlet køreafstand på ca. 700 m (0,43 mile).
Det meste af videnskabs- og ingeniørteamet får en meget tiltrængt pause for at tilbringe tid med deres familier efter at have uploadet 11 aktiviteter værd forud for tiden for at holde roboten nynder i juleferie. Et skeletbesætning hos JPL holder øje med at håndtere eventuelle uønskede situationer.
En af de vigtigste prioriteter er at erhverve et Mastcam-farvepanorama med høj opløsning på 360 grader. Dette vil være uvurderlig for valg af det allerførste rock-mål at bore ind i og erhverve en prøve fra det indre - en bedrift, der aldrig før er forsøgt på Mars.
”Vi besluttede at køre til et sted med en god udsigt over bjergene omkring Yellowknife Bay for at tillade god billedbehandling af disse outcrops før ferieferien,” siger Rover Science-teammedlem Ken Herkenhoff. "Da billederne returneres i pausen, kan vi bruge dem til at hjælpe med at beslutte, hvor vi skal udføre den første boreoperation."
Holdet forventer at vælge et boremål en gang i januar 2013 efter en omhyggelig udvælgelsesproces.
Den 7 fod (2 m) lange robotarm leverer den indledende, pulveriserede klippeprøve til indløbsåbninger på roverdækket til analyse af den højdrevne duo af miniaturiserede kemilaboratorier ved navn Chemin & SAM.

Billedtekst: Nysgerrighed udsætter robotarmen på Sol 129 og undersøger klippe med APXS og MAHLI videnskabsinstrumenter for at karakterisere klippe- og jordkomposition. Denne sammensatte mosaik blev syet af Navcam-billeder fra Sol 129 (16. december) og tidligere sols og viser placeringen af Chemin-prøveindløbsåbningen på roverdækket. Kredit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Nysgerrigheden vil tilbringe mindst en måned eller mere på at undersøge Glenelg, inden de tager af sted på den næsten år lange vandring til hendes vigtigste destination - de sedimentære lag i de nederste rækker af det 3 km høje bjerg ved navn Mount Sharp.

Billedtekst: Scanning Mount Sharp fra Yellowknife Bay på Sol 136. Denne fotomosaik samlet fra Mastcam 100 kamerabilleder blev snappet af Curiosity på Sol 136 (23. december) - fra hendes nuværende placering. Den viser en del af den lagdelte haug kaldet Mount Sharp, hendes vigtigste destination. At få et 360-farvepanorama i høj opløsning fra Yellowknife Bay er en højt prioriteret opgave for rover i juleferie. Kredit: NASA / JPL-Caltech / Marco Di Lorenzo / Ken Kremer
Når den Martiske krage flyver, er de betagende omgivelser på Mount Sharp ca. 10 km væk.
Missionsmålet er at søge efter levesteder og bestemme, om Mars nogensinde kunne have understøttet mikrobiel liv i fortiden eller nutiden i den 2-årige primære missionsfase.

Billedtekst: Curiosity Traverse Map, Sol 130. Dette kort sporer, hvor Curiosity kørte mellem landing på et sted ved navn "Bradbury Landing", og den position, der blev nået under Sol 130 (17. december, 2012) på et sted ved navn "Yellowknife Bay", som er inde i et område kaldet “Glenelg”. Indsatsen viser de seneste ben på traversen mere detaljeret. Kredit: NASA / JPL-Caltech / Univ. fra Arizona