Det følgende er et uddrag fra min nye bog, "Utrolige historier fra rummet: Et bagved scenen kig på missionerne, der ændrer vores syn på kosmos," som udkommer i morgen, december. Bogen er et indvendigt kig på flere aktuelle NASAs robotbesøg, og dette uddrag er del 1 af 3, som vil blive sendt her på Space Magazine, i kapitel 2, “Roving Mars with Curiosity.” Bogen fås ved bestilling hos Amazon og Barnes & Noble.
Syv terrorminutter
Det tager cirka syv minutter, før et mellemstor rumfartøj - såsom en rover eller en robotlander - går ned gennem Mars-atmosfæren og når planetens overflade. I løbet af disse korte minutter er rumfartøjet nødt til at retardere fra sin brændende indkommende hastighed på ca. 13.000 km / h (20.900 km / t) for at røre ved kun 2 km / h (3 km / t) eller mindre.
Dette kræver, at en Rube Goldberg-lignende serie af begivenheder finder sted i perfekt rækkefølge med præcis koreografi og timing. Og det hele skal ske automatisk via computeren uden input fra nogen på Jorden. Der er ingen måde at lede rumfartøjet fjernt fra vores planet, omkring 250 millioner kilometer væk. På denne afstand tager radiosignalforsinkelsestiden fra Jorden til Mars over 13 minutter. Derfor, når den syv minutters nedstigning er færdig, er alle disse begivenheder sket - eller ikke sket - og ingen på Jorden ved, hvilken. Enten sidder dit rumfartøj storslået på Mars's overflade eller ligger i en nedbrudt bunke.

Det er grunden til, at forskere og ingeniører fra missionerne til Mars kalder det ”Syv minutter med terror.”
Og med Mars Science Laboratory (MSL) -missionen, der blev lanceret fra Jorden i november 2011, steg frygt og forvirring over det, der officielt kaldes 'Indrejse, afstamning og landing' (EDL), eksponentielt. MSL har en 1 ton (900 kg), 6-hjulet rover ved navn Curiosity, og denne rover skulle bruge et helt nyt, uforsøgt landingssystem.
Indtil videre har alle Mars-landere og rovere brugt - i rækkefølge - en raketstyret indgang, et varmeskærm til at beskytte og langsomt køretøjet, derefter en faldskærm, efterfulgt af thrustere for at bremse køretøjet endnu mere. Nysgerrighed ville også bruge denne sekvens. En sidste afgørende komponent omfattede imidlertid et af de mest komplekse landingsenheder, der nogensinde er fløjet.

Døbt “Sky Crane”, ville en svævende raketapen sænke roveren på 66 fod (20 meter) kabler af Vectran reb som en rappellerende bjergbestiger, med roveren blød landing direkte på sine hjul. Alt dette skulle afsluttes i løbet af få sekunder, og når den indbyggede computer følte touchdown, ville pyroteknikker adskille rebene, og det svævende nedstigningsstadium ville zoome væk ved fuld gashåndtaget til at ramme land langt fra nysgerrighed.
Efter at have kompliceret sagen yderligere, skulle denne rover forsøge den mest præcise off-world landing nogensinde og satte sig ned i et krater ved siden af et bjerg på højden af Mount Rainier.
En stor del af usikkerheden var, at ingeniører aldrig kunne teste hele landingssystemet sammen, i rækkefølge. Og intet kunne simulere de brutale atmosfæriske forhold og lettere tyngdekraft, der findes på Mars, bortset fra at være på selve Mars. Da den virkelige landing var første gang, at den fulde Sky Crane blev brugt, var der spørgsmål: Hvad hvis kablerne ikke adskilte sig? Hvad hvis nedstigningen var ved at falde lige oven på roveren?
Hvis Sky Crane ikke fungerede, ville det være spillet over for en mission, der allerede var overvundet så meget: tekniske problemer, forsinkelser, omkostningsoverskridelser og vrede fra kritikere, der sagde, at denne $ 2,5 milliarder Mars rover blødede penge væk fra resten af NASAs planetariske efterforskningsprogram.

Missioner til Mars
Med sin røde glød på nattehimmlen har Mars vinket til skyblæsere i århundreder. Som den nærmeste planet til Jorden, der tilbyder ethvert potentiale for fremtidige menneskelige missioner eller kolonisering, har det været af stor interesse i tidsudforskningen af rummet. Til dato er over 40 robotmissioner blevet lanceret til den røde planet ... eller mere præcist er 40-pluss-missioner blevet forsøgt.
Inkluderet alle amerikanske, europæiske, sovjetiske / russiske og japanske bestræbelser har mere end halvdelen af Mars-missioner mislykkedes, enten på grund af en lanceringskatastrofe, en fejlfunktion på vej til Mars, et knust forsøg på at glide ind i bane eller en katastrofal landing. Mens de nylige missioner har haft større succes end vores første banebrydende forsøg på at udforske Mars in situ (på lokation), er videnskabsmænd og ingeniører i rummet kun delvist narret, når de taler om ting som en 'Great Galactic Ghoul' eller 'Mars Curse', der messer sammen missioner.

Men der har også været vidunderlige succeser. Tidlige missioner i 1960'erne og 70'erne som Mariner orbiters og vikingelandere viste os en slående smuk, skønt golde og klippefyldte verden, hvorved alle håb om 'små grønne mænd' som vores planetariske naboer forhindrede. Men senere missioner afslørede en dikotomi: storslået ørkenelighed kombineret med fristende antydninger til fortidens - eller måske endda nutiden - vand og global aktivitet.
I dag er Mars 'overflade kold og tør, og dens hvisken-tynde atmosfære beskytter ikke planeten mod bombardement af stråling fra Solen. Men indikationer er, at forholdene på Mars ikke altid var på denne måde. Synlige fra kredsløb er kanaler og indviklede dalsystemer, der ser ud til at være skåret ud af vand.
I årtier har planetforskere drøftet, om disse egenskaber dannede sig i korte, våde perioder forårsaget af kataklysmiske begivenheder, såsom et massivt asteroideangreb eller pludselig klimaulykke, eller om de dannede sig over millioner af år, hvor Mars kan have været kontinuerligt varm og våd. Meget af bevisene hidtil er tvetydige; disse funktioner kunne have dannet sig på begge måder. Men for milliarder af år siden, hvis der var floder og oceaner, ligesom på Jorden, kunne livet have taget greb.

Rovers
Curiosity rover er det fjerde mobile rumfartøj, som NASA har sendt til Mars 'overflade. Den første var en 23 pund (10,6 kg) rover ved navn Sojourner, der landede på en klædt Martian-slette den 4. juli 1997. Omkring størrelsen på en mikrobølgeovn var den 2-fods (65 cm) lange Sojourner aldrig krydset mere end 40 meter væk fra sin lander og basestation. Rover og lander udgjorde sammen Pathfinder-missionen, som forventedes at vare ca. en uge. I stedet varede det næsten tre måneder, og duoen returnerede 2,6 gigabits med data, knapede mere end 16.500 billeder fra lander og 550 billeder fra rover, samt foretog kemiske målinger af klipper og jord og studerede Mars 'atmosfære og vejr. Den identificerede spor efter en varmere, vådere fortid for Mars.

Missionen fandt sted, da Internettet netop voksede popularitet, og NASA besluttede at lægge billeder fra rover online, så snart de blev strålede til Jorden. Dette endte med at blive en af de største begivenheder i den unge Internets historie, med NASAs websted (og spejlsider oprettet til den høje efterspørgsel), der modtog over 430 millioner hits i de første 20 dage efter landing.
Pathfinder benyttede også et usædvanligt landingssystem. I stedet for at bruge thrustere til at røre ved overfladen, sammenbyggede ingeniører et system med kæmpe airbags til at omringe og beskytte rumfartøjet. Efter at have anvendt det konventionelle system med en raketstyret indgang, varmeskjold, faldskærme og thrustere, blev luftposerne oppustet og den kokonede lander faldt fra 30 m (30 m) over jorden. Efter at have hoppet flere gange over Mars 'overfladetider som en kæmpe strandkugle, sluttede Pathfinder til sidst, airbags tømmede ud og lander åbnede for at give roveren mulighed for at dukke op.
Selvom det måske lyder som en skør landingstrategi, fungerede den så godt, at NASA besluttede at bruge større versioner af airbags til den næste rover-mission: to identiske rovere ved navn Spirit og Opportunity. Mars Exploration Rovers (MER) er omtrent på størrelse med en ridende græsslåmaskine, 1,6 fod (1,6 meter) lang, og vejer ca. 185 kg. Spirit landede med succes nær Mars 'ækvator den 4. januar 2004, og tre uger senere sprang muligheden ned på den anden side af planeten. Målet med MER var at finde bevis for fortidens vand på Mars, og begge rovere ramte jackpotten. Blandt mange fund fandt muligheden antikke klippeafgrøder, der blev dannet i strømmende vand, og Spirit fandt usædvanlige blomkålformede silicagrupper, som forskere stadig studerer, men de kan give ledetråde til potentielt oldtidens Marsliv.

Utroligt nok ved denne skrivning (2016) kører muligheden rover stadig, kører mere end et maraton (26 km / 42 km), og det fortsætter med at udforske Mars ved et stort krater ved navn Endeavour. Spirit buk imidlertid efter for et tab af magt i den kolde Marsvinter i 2010 efter at have siddet i en sandfang. De to rovere overlevede langt deres forventede 90-dages levetid.
På en eller anden måde udviklede roverne hver især en distinkt 'personlighed' - eller måske en bedre måde at udtrykke det på er, at mennesker tildelt personligheder med robotterne. Spirit var et problem barn og drama dronning, men måtte kæmpe for enhver opdagelse; Mulighed, en privilegeret yngre søster og stjerneudøver, da nye fund syntes at komme let for hende. Ånd og mulighed var ikke designet til at være sød, men de charmerende rovers fangede både fantasier fra børn og erfarne rumveteraner. MER-projektleder John Callas kaldte engang tvillingroverne "de sødeste darn ting ud i solsystemet." Da de langvarige, pludde rovere overvinde farer og farer, sendte de postkort fra Mars hver dag. Og jordboere elskede dem for det.
Nysgerrighed
Selvom det længe har været på vores liste over opgaveliste, har vi endnu ikke fundet ud af, hvordan vi skal sende mennesker til Mars. Vi har brug for større og mere avancerede raketter og rumfartøjer, bedre teknologi til ting som livsstøtte og dyrkning af vores egen mad, og vi har virkelig ikke evnen til at lande de meget store nyttelaster, der er nødvendige for at skabe en menneskelig bosættelse på Mars.
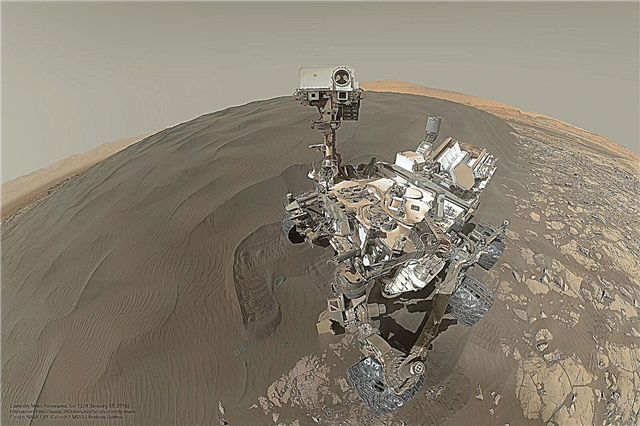
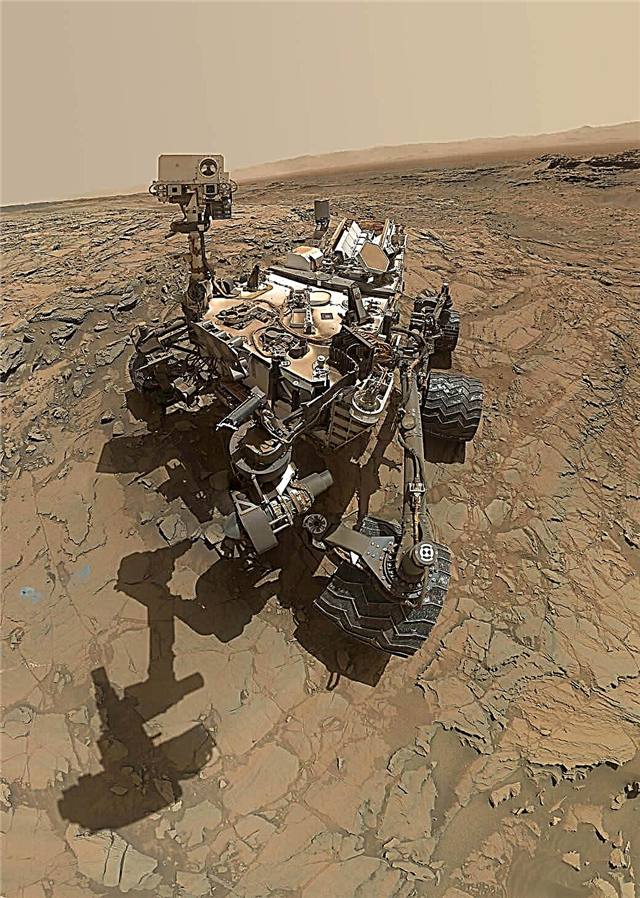
Men i mellemtiden - mens vi prøver at finde ud af alt det - har vi sendt det robotækvivalent af en menneskelig geolog til Den Røde Planet. Den bilstore Curiosity rover er bevæbnet med en række sytten kameraer, en drill, en scoop, en håndlinser og endda en laser. Disse værktøjer ligner udstyr geologer bruger til at studere klipper og mineraler på Jorden. Derudover efterligner denne rover menneskelig aktivitet ved bjergbestigning, spisning (billedligt set), bøjning af sin (robot) arm og taget selfies.

Denne rovende robotgeolog er også et mobilt kemi laboratorium. I alt ti instrumenter på roveren hjælper med at søge efter organisk kulstof, der kan indikere det råmateriale, der kræves af livet, og "sniffe" den Martiske luft og forsøger at lugte, hvis gasser som metan - som kan være et tegn på liv - er til stede. Curiositys robotarm bærer en schweizisk hærkniv af gadgets: et forstørrelsesobjektivlignende kamera, et spektrometer til måling af kemiske elementer og en boremaskine til at bore inde i klipper og fodringsprøver til laboratorierne med navnet SAM (prøveanalyse ved Mars) og) og CheMin (Kemi og mineralogi). ChemCam-laseren kan fordampe sten fra op til 23 fod (7 meter) væk og identificere mineraler fra spektret af lys, der udsendes fra den sprængte klippe. En vejrstation og strålingsmonitor afslutter enhederne om bord.
Med disse kameraer og instrumenter bliver roveren øjne og hænder for et internationalt team på omkring 500 jordbundne forskere.
Mens de tidligere Mars-rovere brugte solpaneler til at samle sollys til strøm, bruger Curiosity en RTG som New Horizons. Elektriciteten, der genereres fra RTG, driver gentagne gange genopladelige lithium-ion-batterier, og RTG's varme ledes også ind i rover-chassiset for at holde den indvendige elektronik varm.
Med Curiositys størrelse og vægt var airbag-landingssystemet, der blev brugt af de foregående rovere, ude af spørgsmålet. Som NASA-ingeniøren Rob Manning forklarede: "Du kan ikke sprette noget så stort." Sky Crane er en dristig løsning.
Curiosity's mission: find ud af, hvordan Mars udviklede sig over milliarder af år og afgør, om det engang var - eller endda nu - er i stand til at støtte mikrobielt liv.
Nysgerrighedens mål for efterforskning: en 5,5 km (5,5 km) høj Mars-bjergforskere kalder Mt. Skarp (formelt kendt som Aeolis Mons), der sidder midt i Gale-krateret, et slagsmål med en diameter på 96 km (155 km).
Gale blev valgt blandt 60 kandidatsteder. Data fra kredsende rumfartøj bestemte, at bjerget har snesevis af lag af sedimentær klippe, måske bygget over millioner af år. Disse lag kunne fortælle historien om Mars 'geologiske og klimahistorie. Derudover ser både bjerget og krateret ud til at have kanaler og andre funktioner, der ser ud til, at de blev skåret ud af flydende vand.
Planen: MSL skulle lande i en lavere, fladere del af krateret og omhyggeligt arbejde sig opad mod bjerget, studere hvert lag og i det væsentlige tage en rundvisning i epokerne fra Mars 'geologiske historie.
Den sværeste del ville være at komme dertil. Og MSL-teamet havde kun én chance for at få det rigtigt.
Landing Night
Curiositys landing den 5. august 2012 var en af de mest forventede rumundersøgelsesbegivenheder i den nyere historie. Millioner af mennesker så begivenheder, der udspiller sig online og på tv, med feeds på sociale medier brusende med opdateringer. NASA TV's feed fra JPLs missionskontrol blev sendt direkte på skærmene i New Yorks Time Square og på spillesteder rundt om i verden, der var vært for 'landingsfester'.
Men episentret af handling var på JPL, hvor hundreder af ingeniører, videnskabsmænd og NASA-embedsmænd samledes på JPL's Space Flight Operations Facility. EDL-teamet - alle iført matchende lyseblå poloshirts - overvågede computerkonsoller ved missionskontrol.
To medlemmer af teamet skiller sig ud: EDL-teamet leder Adam Steltzner - der bærer sit hår i en Elvis-lignende pompadour - tempoet frem og tilbage mellem rækkerne med konsoller. Flydirektør Bobak Ferdowski sportede og en detaljerede stjerner og striber Mohawk. Naturligvis har eksotiske frisurer i det 21. århundrede erstattet 1960'ernes sorte briller og lommebeskyttelsesmaskiner til NASA-ingeniører.

På tidspunktet for landing var Ashwin Vasavada en af de længst tjente videnskabsmænd på missionsteamet, da han tiltrådte MSL som viceprojektforsker i 2004, da roveren var under opførelse. Dengang arbejdede en stor del af Vasavadas job med instrumentteamene for at færdiggøre målene for deres instrumenter og overvåge tekniske teams for at hjælpe med at udvikle instrumenterne og integrere dem med rover.
Hvert af de ti udvalgte instrumenter bragte et team af videnskabsmænd, så med ingeniører, ekstra personale og studerende var der hundreder af mennesker, der gjorde rover klar til lancering. Vasavada hjalp til med at koordinere enhver beslutning og ændring, der kunne påvirke den eventuelle videnskab, der blev gjort på Mars. Under landingen var det eneste, han kunne gøre, men se på.
”Jeg var i lokalet ved siden af kontrolrummet, der blev vist på tv,” sagde Vasavada. ”Til landingen var der intet, jeg kunne gøre, bortset fra at realisere de sidste otte år af mit liv, og hele min fremtid kørte alle sammen på de syv minutter EDL.”
Desuden førte det faktum, at ingen ville kende roverens virkelige skæbne før 13 minutter efter, på grund af radioforsinkelsestiden, til en følelse af hjælpeløshed for alle hos JPL.
"Selvom jeg sad i en stol," tilføjede Vasavada, "jeg tror, jeg var mentalt krøllet op i fosterets stilling."
Da Curiosity gik nærmere Mars, flyttede tre andre veteran-rumfartøjer, der allerede kredsede rundt om planeten, i position for at kunne holde øje med den nye New York, da den transmitterede information om dens status. Først kommunikerede MSL direkte til Deep Space Network (DSN) antenner på Jorden.
For at gøre telemetri fra rumfartøjet så strømlinet som muligt under EDL sendte Curiosity 128 enkle, men tydelige toner ud, der angav, hvornår trin i landingsprocessen blev aktiveret. Allen Chen, en ingeniør i kontrolrummet annoncerede hver af dem, da de kom: en lyd indikerede, at rumfartøjet kom ind i Mars 'atmosfære; en anden signalerede, at skyderen blev fyret og ført rumfartøjet mod Gale-krateret. Forsigtig klapp og smil kom fra teamet på Mission Control i de tidlige toner, med følelser stigende, da rumfartøjet bevægede sig tættere og tættere på overfladen.
Halvvejs gennem nedstigningen gik MSL under den Martiske horisont og satte den ud af kommunikation med Jorden. Men de tre kredsløb - Mars Odyssey, Mars Reconnaissance Orbiter og Mars Express - var klar til at indhente, registrere og videresende data til DSN.

Sømløst fortsatte tonerne til Jorden, da hvert trin i landing fortsatte fejlfrit. Faldskærmen indsættes. Varmeskjoldet faldt væk. En tone signaliserede nedstigningstrinnet, der bærer roveren, sluppet for faldskærmen, en anden angav drevet flyvning og nedstigning mod overfladen. En anden tone betød, at Sky Crane begyndte at sænke roveren til overfladen.
Der kom en tone, der indikerede, at Curiosity's hjul rørte overfladen, men selv det betød ikke succes. Holdet skulle sørge for, at Sky Crane-flyvemanøvren fungerede.
Derefter kom den tone, de ventede på: "Touchdown bekræftede," jublede Chen. "Vi er sikre på Mars!"
Pandemonium og glæde brød ud i JPLs missionskontrol, på landingsfeststederne og på sociale medier. Det så ud til, at verden fejrede sammen i det øjeblik. Omkostningsoverskridelser, forsinkelser, alle de negative ting, der nogensinde er sagt om MSL-missionen, syntes at forsvinde med triumfen ved landing.
”Velkommen til Mars!” direktøren for Jet Propulsion Laboratory, Charles Elachi sagde på en pressekonference efter den dramatiske touchdown, ”I aften landede vi, i morgen begynder vi at udforske Mars. Vores nysgerrighed har ingen grænser. ”

”De syv minutter gik faktisk rigtig hurtigt,” sagde Vasavada. ”Det var forbi, før vi vidste det. Så sprang alle op og ned, selvom de fleste af os stadig behandlede, at det gik så med succes. ”
At landingen gik så godt - faktisk perfekt - kan have faktisk chokeret noget af holdet hos JPL. Mens de havde øvet Curiositys landing flere gange, bemærkelsesværdigt, var de aldrig i stand til at lande køretøjet i deres simuleringer.
"Vi prøvede at øve det meget nøjagtigt," sagde Vasavada, "så alt var i synkronisering - både den telemetri, som vi havde simuleret, der ville komme fra rumfartøjet, sammen med realtidsanimationer, der var blevet oprettet. Det var en temmelig kompleks ting, men det fungerede faktisk aldrig. Så den rigtige, faktiske landing var første gang, at alt fungerede rigtigt. ”
Nysgerrighed blev programmeret til straks at tage billeder af omgivelserne. Inden for to minutter efter landing blev de første billeder strålet til Jorden og dukket op på visningsskærmene på JPL.
”Vi havde afstemt orbiters til at flyve over under landing, men vidste ikke med sikkerhed, om deres relælink ville vare længe nok til at få de første billeder nede,” sagde Vasavada. ”De første billeder var ret rattede, fordi beskyttelsesdækslerne stadig var på kameraerne, og thrusterne havde sparket en masse støv på dækslerne. Vi kunne virkelig ikke se det meget godt, men vi sprang stadig op og ned alligevel, fordi dette var billeder fra Mars. ”
Forbløffende viste et af de første billeder nøjagtigt, hvad roveren var blevet sendt til studiet.
”Vi var landet med kameraerne, der stort set vendte direkte mod Mt. Skarp, ”sagde Vasavada og rystede på hovedet. ”I HazCam-billedet (farekamera) lige mellem hjulene fik vi dette smukke skud. Der var bjerget. Det var som et eksempel på hele missionen lige foran os. ”

I morgen: Del 2 af "Roving Mars med nysgerrighed" med "Living on Mars Time" og "Discoveries"
“Utrolige historier fra rummet: Et kig på baggrund af scenerne på missionerne, der ændrer vores syn på kosmos”, udgives af Page Street Publishing, et datterselskab af Macmillan.