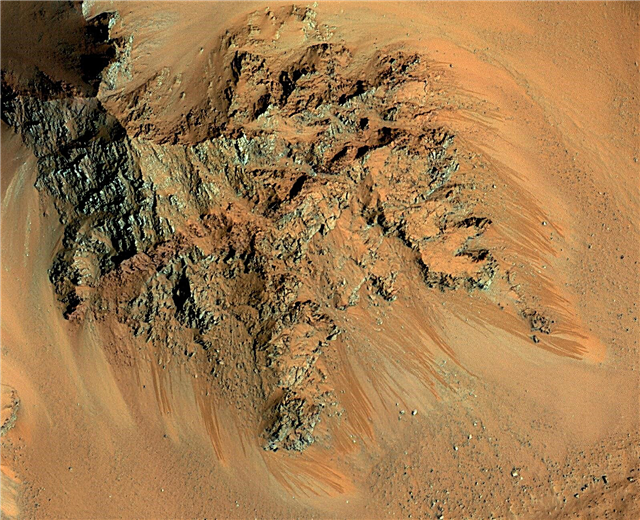
Hvis du har kigget på HiRISE-billederne i høj opløsning fra Mars Reconnaissance Orbiter, eller havde haft chancen for at udforske den nye Google Mars, ved du, at Mars er fyldt med kratre, bjerge, måger og alle mulige interessante - og farlige - terræn . Områder som disse med lagdelte aflejringer, sedimenter, brud og fejl er bare den type steder at kigge efter kilderne til metan, der produceres på Mars. Men det er alt for risikabelt at sende vores nuværende stil af rovers, herunder Mars Science Laboratory (MSL) i 2011, i forrædersk terræn. Men ingeniører fra JPL sammen med studerende ved Californien Institut for Teknologi har designet og testet en alsidig robot med lav masse, der kunne føjes til større rovere som MSL, der kan rappel af klipper, rejse ubehageligt over stejle og klippefyldte terræn og udforske dybe kratere.
Denne prototype rover, kaldet Axel, kan muligvis hjælpe fremtidens robot rumfartøj med bedre at udforske og undersøge fremmede verdener som Mars. På jorden kan Axel muligvis hjælpe med søgning og redning.
”Axel udvider vores evne til at udforske terræn, som vi ikke har været i stand til at udforske i fortiden, såsom dybe kratere med lodret skrånende bjergområder,” sagde Axels hovedundersøger, Issa A.D. Nesnas, fra JPLs afdeling for robotik og mobilitet. ”Også fordi Axel er relativt lavmasse, kan en mission have et antal Axel-rovere. Det vil give os muligheden for at være mere aggressiv med det terræn, vi ville udforske, samtidig med at den overordnede risiko er håndterbar. ”
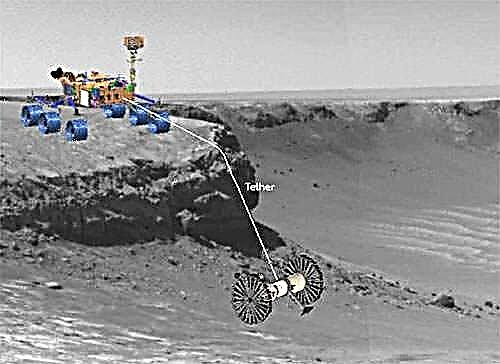
Nesnas sagde, at Axel er som en yo-yo - den ligger på en bund, der er knyttet til en større rover og kan gå op og ned på siderne af kratere, kløfter og sluge og udforske områder, der ikke er sikre for andre rover.

Det enkle og elegante design af Axel, der kan fungere både på hovedet og på højre side op, bruger kun tre motorer: en til at kontrollere hvert af dets to hjul og et tredje til at styre en håndtag. Håndtaget indeholder et scoop for at samle måner eller planetarisk materiale, som forskere kan studere, og det justerer også robotens to stereokameraer, der kan vippe 360 grader.

Axels cylindriske krop har computer- og trådløs kommunikationsfunktioner og en inertial sensor, der fungerer autonomt. Det sporter også et bind, som Axel kan frigøre for at stige ned fra et større lander, rover eller ankerpunkt. Roveren kan bruge forskellige hjultyper, fra store sammenklappelige hjul til oppustelige dem, som hjælper roveren med at tolerere en hård landing og håndtere klippefelt.
Axel har været i udvikling siden 1999, og studerende fra Caltech, Purdue University og Arkansas Tech University har samarbejdet med JPL gennem årene for at udvikle denne alsidige rover.
For mere information om Axel, se JPLs Axel-side og Caltechs Axel-websted.